5. 在 Arduino 上为 microTVM 训练视觉模型
单击 此处 下载完整的示例代码
作者:Gavin Uberti
本教程介绍如何训练 MobileNetV1 模型以适应嵌入式设备,以及如何使用 TVM 将这些模型部署到 Arduino。
背景简介
构建物联网设备时,通常想让它们能够看到并理解它们周围的世界。可以采取多种形式,但通常设备也会想知道某种物体是否在其视野中。
例如,安全摄像头可能会寻找人,因此它可以决定是否将视频保存到内存中。红绿灯可能会寻找汽车,这样它就可以判断哪个信号灯应该首先改变。或者森林相机可能会寻找一种动物,从而估计动物种群的数量。
为使这些设备价格合理,我们希望为这些设备配置一个低成本处理器,如 nRF52840(在 Mouser 上每个售价 5 美元)或 RP2040(每个只需 1.45 美元)。
这些设备的内存非常小(~250 KB RAM),这意味着传统的边缘 AI 视觉模型(如 MobileNet 或 EfficientNet)都不能够运行。本教程将展示如何修改这些模型以解决此问题。然后,使用 TVM 为 Arduino 编译和部署。
安装必要软件
本教程使用 TensorFlow(Google 创建的一个广泛使用的机器学习库)来训练模型。TensorFlow 是一个非常底层的库,因此要用 Keras 接口来从 TensorFlow 获取信息。还会用 TensorFlow Lite 量化模型,因为 TensorFlow 本身不支持这一点。
生成模型后,使用 TVM 对其进行编译和测试。为避免必须从源代码构建,需要安装 tlcpack - TVM 的社区构建工具,还要安装 imagemagick 和 curl 来预处理数据:
%%bash
pip install -q tensorflow tflite
pip install -q tlcpack-nightly -f https://tlcpack.ai/wheels
apt-get -qq install imagemagick curl
# 为 Nano 33 BLE 安装 Arduino CLI 和库
curl -fsSL https://raw.githubusercontent.com/arduino/arduino-cli/master/install.sh | sh
/content/bin/arduino-cli core update-index
/content/bin/arduino-cli core install arduino:mbed_nano
使用 GPU
本教程演示如何训练神经网络,训练神经网络需要大量的计算能力,使用 GPU 训练速度会更快。若在 Google Colab 上查看本教程,可通过 Runtime->Change runtime type 并选择“GPU”作为硬件加速器来启用 GPU。若在本地运行,则可按照 TensorFlow 指南 进行操作。
使用以下代码测试 GPU 是否安装:
import tensorflow as tf
if not tf.test.gpu_device_name():
print("No GPU was detected!")
print("Model training will take much longer (~30 minutes instead of ~5)")
else:
print("GPU detected - you're good to go.")
输出结果:
No GPU was detected!
Model training will take much longer (~30 minutes instead of ~5)
选择工作目录
选择工作目录,把图像数据集、训练好的模型和最终的 Arduino sketch 都放在此目录下,如果在 Google Colab 上运行,所有内容将保存在/root(又名 ~)中,若在本地运行,可将其存储在其他地方。注意,此变量仅影响 Python 脚本 - 还必须调整 Bash 命令。
import os
FOLDER = "/root"
下载数据
卷积神经网络通过大量图像以及标签来学习,为获得这些图像,需要一个公开可用的数据集,这个数据集中要包含数千张各种各样的目标的图像,以及每张图像中内容的标签,还需要一堆不是汽车的图像,因为我们需要区分这两个类别。
本教程将创建一个模型,来检测图像中是否包含汽车,也可以用于检测其他目标物体!只需将下面的源 URL 更改为包含另一种目标图像的源 URL。
下载 斯坦福汽车数据集,该数据集包含 16,185 个彩色汽车图像。还需要不是汽车的随机物体的图像,这里我们使用的是 COCO 2017 验证集(比完整的训练集小,因此下载速度快,在完整数据集上进行训练效果更佳)。注意,COCO 2017 数据集中有一些汽车图像,但是数量很少,不会对结果产生影响 - 只会稍微降低准确度。
使用 TensorFlow 数据加载器程序,并改为手动操作,以确保能够轻松更改正在使用的数据集。最终得到以下文件层次结构:
/root
├── images
│ ├── object
│ │ ├── 000001.jpg
│ │ │ ...
│ │ └── 016185.jpg
│ ├── object.tgz
│ ├── random
│ │ ├── 000000000139.jpg
│ │ │ ...
│ │ └── 000000581781.jpg
│ └── random.zip
还应该注意到,斯坦福汽车有 8k 图像,而 COCO 2017 验证集是 5k 图像——并不是对半分割!若愿意可在训练期间对这些类进行不同的加权进行纠正,不纠正仍然可以进行有效训练。下载斯坦福汽车数据集大约需要 2分钟,而 COCO 2017 验证集需要 1分钟。
import os
import shutil
import urllib.request
# 下载数据集
os.makedirs(f"{FOLDER}/downloads")
os.makedirs(f"{FOLDER}/images")
urllib.request.urlretrieve(
"https://data.deepai.org/stanfordcars.zip", f"{FOLDER}/downloads/target.zip"
)
urllib.request.urlretrieve(
"http://images.cocodataset.org/zips/val2017.zip", f"{FOLDER}/downloads/random.zip"
)
# 解压并重命名它们的文件夹
shutil.unpack_archive(f"{FOLDER}/downloads/target.zip", f"{FOLDER}/downloads")
shutil.unpack_archive(f"{FOLDER}/downloads/random.zip", f"{FOLDER}/downloads")
shutil.move(f"{FOLDER}/downloads/cars_train/cars_train", f"{FOLDER}/images/target")
shutil.move(f"{FOLDER}/downloads/val2017", f"{FOLDER}/images/random")
输出结果:
'/tmp/tmpijas024t/images/random'
加载数据
目前,数据以各种大小的 JPG 文件形式存储在磁盘上。要使用其进行训练,必须将图像加载到内存中,并调整为 64x64,然后转换为原始的、未压缩的数据。可用 Keras 的 image_dataset_from_directory 来解决该问题,它加载图像时,每个像素值都是从 0 到 255 的浮点数。
从子目录结构中得知 /objects 中的图像是一类,而 /random 中的图像是另一类。设置 label_mode='categorical' 让 Keras 将这些转换为分类标签(一个 2x1 向量),对目标类的对象来说是 [1, 0],对于其他任何东西来说是 [0, 1] 向量,此外,还将设置 shuffle=True 以随机化示例的顺序。
将样本分组以加快训练速度,设置 batch_size = 32。
最后,在机器学习中,通常希望输入是小数字。因此使用 Rescaling 层来更改图像,使每个像素都是 0.0 到 1.0 之间的浮点数,而不是 0 到 255。注意,因为要使用 lambda 函数 ,所以不要重新调整分类标签。
IMAGE_SIZE = (64, 64, 3)
unscaled_dataset = tf.keras.utils.image_dataset_from_directory(
f"{FOLDER}/images",
batch_size=32,
shuffle=True,
label_mode="categorical",
image_size=IMAGE_SIZE[0:2],
)
rescale = tf.keras.layers.Rescaling(scale=1.0 / 255)
full_dataset = unscaled_dataset.map(lambda im, lbl: (rescale(im), lbl))
输出结果:
Found 13144 files belonging to 2 classes.
数据集中有什么?
在将数据集提供给神经网络之前,应对其进行快速验证。数据是否能正确转换?标签是否合适?目标物体与其他物体的比例是多少?可以用 matplotlib 从数据集中显示一些示例:
import matplotlib.pyplot as plt
num_target_class = len(os.listdir(f"{FOLDER}/images/target/"))
num_random_class = len(os.listdir(f"{FOLDER}/images/random/"))
print(f"{FOLDER}/images/target contains {num_target_class} images")
print(f"{FOLDER}/images/random contains {num_random_class} images")
# 显示一些样本及其标签
SAMPLES_TO_SHOW = 10
plt.figure(figsize=(20, 10))
for i, (image, label) in enumerate(unscaled_dataset.unbatch()):
if i >= SAMPLES_TO_SHOW:
break
ax = plt.subplot(1, SAMPLES_TO_SHOW, i + 1)
plt.imshow(image.numpy().astype("uint8"))
plt.title(list(label.numpy()))
plt.axis("off")

输出结果:
/tmp/tmpijas024t/images/target contains 8144 images
/tmp/tmpijas024t/images/random contains 5000 images
验证准确度
开发模型时经常要检查它的准确度(例如,看看它在训练期间是否有所改进)。如何做到这一点?可以在所有数据上训练模型,然后让它对相同的数据进行分类。但是,模型可以通过记住所有样本来作弊,这会使其看起来具有非常高的准确性,但实际上表现非常糟糕。在实践中,这种“记忆”被称为过拟合。
为防止这种情况,将留出一些数据(20%)作为验证集,用来检查模型的准确性。
num_batches = len(full_dataset)
train_dataset = full_dataset.take(int(num_batches * 0.8))
validation_dataset = full_dataset.skip(len(train_dataset))
加载数据
在过去的十年中,卷积神经网络 已被广泛用于图像分类任务。EfficientNet V2 等最先进的模型的图像分类效果甚至优于人类。然而,这些模型有数千万个参数,它们无法运行在便宜的监控摄像头计算机上。
应用程序的准确度达到 90% 就足够了。因此可以使用更旧版本更小的 MobileNet V1 架构。但这仍然不够小,默认情况下,对于具有 224x224 输入和 alpha 1.0 的 MobileNet V1,仅存储就需要大约 50 MB。为了减小模型的大小,可调节三个 knob。
首先,可以将输入图像的大小从 224x224 减小到 96x96 或 64x64,Keras 可以轻松做到这一点。还可以将模型的 alpha 从 1.0 降低到 0.25,这使得网络的宽度(和过滤器的数量)缩小了四倍。如果真的空间有限,可以通过让模型拍摄灰度图像而不是 RGB 图像来减少通道数量。
在本教程中,使用 RGB 64x64 输入图像和 alpha 0.25。效果虽然不是很理想,但它允许完成的模型适合 192 KB 的 RAM,同时仍然允许使用官方 TensorFlow 源模型执行迁移学习(如果使用 alpha <0.25 或灰度输入,无法做到这样)。
什么是迁移学习?
深度学习长期以来一直 主导图像分类,但训练神经网络需要大量时间。当一个神经网络“从头开始”训练时,起初参数会随机初始化,缓慢地学习如何区分图像。
从一个已经擅长特定任务的神经网络开始迁移学习,在此示例中,该任务是对 ImageNet 数据集 中的图像进行分类。这意味着神经网络已经具有一些目标检测。
这对于像 MobileNet 这样的图像处理神经网络特别有效,在实践中,模型的卷积层(即前 90% 的层)用于识别 line 和 shape 等低级特征——只有最后几个全连接层用于确定,这些 shape 如何构成网络要检测的目标。
可以通过使用在 ImageNet 上训练的 MobileNet 模型开始训练,该模型已经知道如何识别线条和形状。从这个预训练模型中删除最后几层,并添加自己的最终层。在汽车与非汽车数据集上训练这个联合模型,以调优第一层并从头开始训练最后一层。这种训练已经部分训练过的模型称为微调。
源 MobileNets 模型(用于迁移学习) 已被 TensorFlow 人员预训练,因此可以下载最接近于我们想要的版本( 128x128 输入模型,深度为 0.25)。
os.makedirs(f"{FOLDER}/models")
WEIGHTS_PATH = f"{FOLDER}/models/mobilenet_2_5_128_tf.h5"
urllib.request.urlretrieve(
"https://storage.googleapis.com/tensorflow/keras-applications/mobilenet/mobilenet_2_5_128_tf.h5",
WEIGHTS_PATH,
)
pretrained = tf.keras.applications.MobileNet(
input_shape=IMAGE_SIZE, weights=WEIGHTS_PATH, alpha=0.25
)
修改网络
如上所述,预训练模型旨在对 1,000 个 ImageNet 类别进行分类,但我们希望将其转换为对汽车进行分类。由于只有最后几层是特定于任务的,因此切断原始模型的最后五层,通过执行 respape、dropout、flatten 和 softmax 操作来构建自己的模型的最后几层。
model = tf.keras.models.Sequential()
model.add(tf.keras.layers.InputLayer(input_shape=IMAGE_SIZE))
model.add(tf.keras.Model(inputs=pretrained.inputs, outputs=pretrained.layers[-5].output))
model.add(tf.keras.layers.Reshape((-1,)))
model.add(tf.keras.layers.Dropout(0.1))
model.add(tf.keras.layers.Flatten())
model.add(tf.keras.layers.Dense(2, activation="softmax"))
微调网络
在训练神经网络时,必须设置学习率来控制网络学习速度。太慢和太快都会导致学习效果不好。通常对于 Adam(正在使用的优化器)来说,0.001 是一个相当不错的学习率(并且是 原始论文 中推荐的)。在本示例中,0.0005 效果更好。
将之前的验证集传递给 model.fit,在每次训练时评估模型性能,并能够跟踪模型性能是如何提升的。训练完成后,模型的验证准确率应该在 0.98 左右(这意味着在验证集上训练 100 次,其中 98 次都是预测正确的)。
model.compile(
optimizer=tf.keras.optimizers.Adam(learning_rate=0.0005),
loss="categorical_crossentropy",
metrics=["accuracy"],
)
model.fit(train_dataset, validation_data=validation_dataset, epochs=3, verbose=2)
输出结果:
Epoch 1/3
328/328 - 56s - loss: 0.2151 - accuracy: 0.9280 - val_loss: 0.1213 - val_accuracy: 0.9615
Epoch 2/3
328/328 - 53s - loss: 0.1029 - accuracy: 0.9623 - val_loss: 0.1111 - val_accuracy: 0.9626
Epoch 3/3
328/328 - 52s - loss: 0.0685 - accuracy: 0.9750 - val_loss: 0.1541 - val_accuracy: 0.9505
<keras.callbacks.History object at 0x7efef1110b90>
量化
通过改变输入维度,以及移除底层,将模型减少到只有 219k 个参数,每个参数都是 float32 类型,占用 4 个字节,因此模型将占用将近 1 MB!
此外,硬件可能没有内置对浮点数的支持,虽然大多数高内存 Arduino(如 Nano 33 BLE)确实有硬件支持,但其他一些(如 Arduino Due)则没有。在任何没有专用硬件支持的板上,浮点乘法都会非常慢。
为解决这两个问题可以将模型量化,把权重表示为八位整数,为获得最佳性能,TensorFlow 会跟踪模型中每个神经元的激活方式,因此可以得出,如何最准确地用整数运算,来模拟神经元的原始激活。
可以创建一个具有代表性的数据集来帮助 TensorFlow 实现——原始数据集的一个子集,用于跟踪这些神经元的激活方式。然后将其传递给带有 Optimize 标志的 TFLiteConverter (Keras 本身不支持量化),以告诉 TFLite 执行转换。默认情况下,TFLite 将模型的输入和输出保持为浮点数,因此必须明确告诉它避免这种行为。
def representative_dataset():
for image_batch, label_batch in full_dataset.take(10):
yield [image_batch]
converter = tf.lite.TFLiteConverter.from_keras_model(model)
converter.optimizations = [tf.lite.Optimize.DEFAULT]
converter.representative_dataset = representative_dataset
converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
converter.inference_input_type = tf.uint8
converter.inference_output_type = tf.uint8
quantized_model = converter.convert()
下载所需模型
现已经完成了一个模型,可以在本地或其他教程中使用它(尝试自动调优此模型或在 https://netron.app/ 上查看)。但在做这些事情之前,必须将它写入一个文件(quantized.tflite)。如果你在 Google Colab 上运行本教程,需要取消注释最后两行才能在编写文件后下载文件。
QUANTIZED_MODEL_PATH = f"{FOLDER}/models/quantized.tflite"
with open(QUANTIZED_MODEL_PATH, "wb") as f:
f.write(quantized_model)
# from google.colab import files
# files.download(QUANTIZED_MODEL_PATH)
使用 TVM 为 Arduino 编译
TensorFlow 有一个用于部署到微控制器的内置框架——TFLite Micro。但是,开发板不能很好地支持它,并且不支持自动调优,因此改用 Apache TVM。
TVM 可以与其命令行界面(tvmc)或 Python 界面一起使用。Python 接口功能齐全,且更稳定,因此这里用 Python。
TVM 是一个优化编译器,对模型的优化是通过中间表示分阶段执行的。其中第一个是 Relay(一种强调可移植性的高级 intermediate representation)。从 .tflite 到 Relay 的转换是在不知道“最终目标”的情况下完成的,我们打算在 Arduino 上运行这个模型。
选择 Arduino 板
接下来确定要使用哪个 Arduino 板。最终生成的 Arduino sketch 应该与任何板子兼容,但是提前知道使用的是哪个板子,可以让 TVM 调整其编译策略从而获得更好的性能。
有一点需要注意:要有足够的内存(闪存和 RAM)来运行我们的模型,在 Arduino Uno 上无法运行像 MobileNet 这样的复杂的视觉模型,该板只有 2 kB 的 RAM 和 32 kB 的闪存!而模型有大约 200,000 个参数,因此无法拟合。
本教程使用具有 1 MB 闪存和 256 KB RAM 的 Nano 33 BLE,其他具有更高规格的 Arduino 同样适用。
生成项目
接下来把模型编译为 TVM 的 MLF(模型库格式)intermediate representation,它由 C/C++ 代码组成,专为自动调优而设计。为了提高性能,我们将告诉 TVM 我们正在为 nrf52840 微处理器(Nano 33 BLE 使用的那个)进行编译。此外,还告诉 TVM 使用 C runtime(缩写为 crt),并使用 ahead-of-time 内存分配(缩写为 aot,有助于减少模型的内存占用)。最后,由于 C 没有原生向量化类型,所以用 "tir.disable_vectorize": True 禁用向量化,。
设置了这些配置参数后,调用 tvm.relay.build 将 Relay 模型编译为 MLF intermediate representation。此后,只需要调用 tvm.micro.generate_project 并传入 Arduino 模板项目即可完成编译。
import shutil
import tvm
import tvm.micro.testing
# 在 TFLite 1 和 2 中加载模型的方法不同
try: # TFLite 2.1 and above # TFLite 2.1 及以上
import tflite
tflite_model = tflite.Model.GetRootAsModel(quantized_model, 0)
except AttributeError: # Fall back to TFLite 1.14 method # 回退到 TFLite 1.14 方法
import tflite.Model
tflite_model = tflite.Model.Model.GetRootAsModel(quantized_model, 0)
# 转换为 Relay 中间表示
mod, params = tvm.relay.frontend.from_tflite(tflite_model)
# 设置配置标志以提高性能
target = tvm.micro.testing.get_target("zephyr", "nrf5340dk_nrf5340_cpuapp")
runtime = tvm.relay.backend.Runtime("crt")
executor = tvm.relay.backend.Executor("aot", {"unpacked-api": True})
# 转换为 MLF 中间表示
with tvm.transform.PassContext(opt_level=3, config={"tir.disable_vectorize": True}):
mod = tvm.relay.build(mod, target, runtime=runtime, executor=executor, params=params)
# 从 MLF 中间表示生成一个 Arduino 项目
shutil.rmtree(f"{FOLDER}/models/project", ignore_errors=True)
arduino_project = tvm.micro.generate_project(
tvm.micro.get_microtvm_template_projects("arduino"),
mod,
f"{FOLDER}/models/project",
{
"board": "nano33ble",
"arduino_cli_cmd": "/content/bin/arduino-cli",
"project_type": "example_project",
},
)
输出结果:
/workspace/python/tvm/driver/build_module.py:268: UserWarning: target_host parameter is going to be deprecated. Please pass in tvm.target.Target(target, host=target_host) instead.
"target_host parameter is going to be deprecated. "
测试 Arduino 项目
加载下面两张 224x224 图像(一张是汽车,一张不是汽车),然后执行编译模型来测试 Arduino 项目。
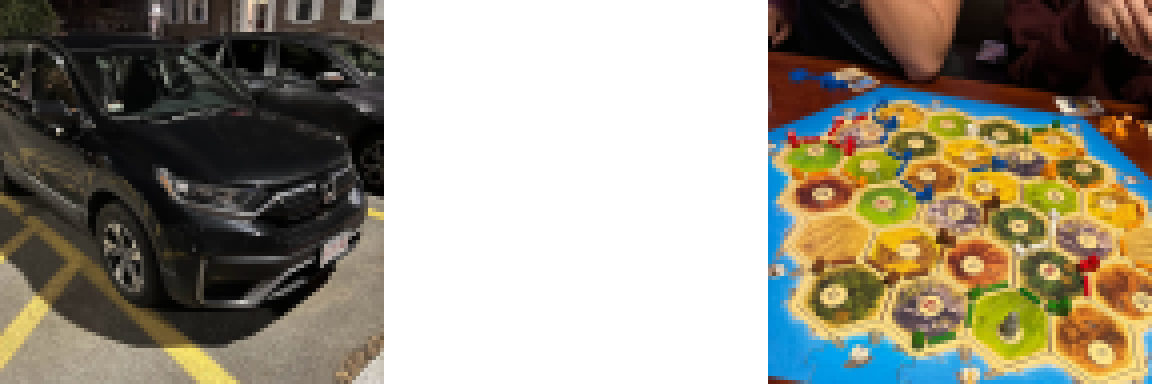
这些是可以从 Imgur 下载的 224x224 PNG 图像。在输入这些图像之前,需要调整它们的大小并转换为原始数据,这可以使用 imagemagick 完成。
由于只编译 C/CPP 文件(和类似文件),因此将原始数据加载到 Arduino 上具有一定的挑战性。可以通过使用内置程序 bin2c 将原始数据嵌入硬编码 C 数组中来解决此问题,该程序输出如下:
static const unsigned char CAR_IMAGE[] = {
0x22,0x23,0x14,0x22,
...
0x07,0x0e,0x08,0x08
};
可以用几行 Bash 代码来完成这两件事:
%%bash
mkdir -p ~/tests
curl "https://i.imgur.com/JBbEhxN.png" -o ~/tests/car_224.png
convert ~/tests/car_224.png -resize 64 ~/tests/car_64.png
stream ~/tests/car_64.png ~/tests/car.raw
bin2c -c -st ~/tests/car.raw --name CAR_IMAGE ~/models/project/car.c
curl "https://i.imgur.com/wkh7Dx2.png" -o ~/tests/catan_224.png
convert ~/tests/catan_224.png -resize 64 ~/tests/catan_64.png
stream ~/tests/catan_64.png ~/tests/catan.raw
bin2c -c -st ~/tests/catan.raw --name CATAN_IMAGE ~/models/project/catan.c
编写 Arduino 脚本
现需要 Arduino 代码来读取刚刚生成的两个二进制数组,并运行模型,把输出记录到串行监视器。该文件将替换 arduino_sketch.ino 作为 sketch 的主文件。
%%writefile /root/models/project.ino
#include "src/model.h"
#include "car.c"
#include "catan.c"
void setup() {
Serial.begin(9600);
TVMInitialize();
}
void loop() {
uint8_t result_data[2];
Serial.println("Car results:");
TVMExecute(const_cast<uint8_t*>(CAR_IMAGE), result_data);
Serial.print(result_data[0]); Serial.print(", ");
Serial.print(result_data[1]); Serial.println();
Serial.println("Other object results:");
TVMExecute(const_cast<uint8_t*>(CATAN_IMAGE), result_data);
Serial.print(result_data[0]); Serial.print(", ");
Serial.print(result_data[1]); Serial.println();
delay(1000);
}
编译代码
项目已经生成,TVM 的工作就基本完成了!仍然可以调用 arduino_project.build() 和 arduino_project.upload(),它们只是使用了 arduino-cli 的编译和 flash 命令。另外一个教程中会介绍如何自动调优我们的模型。最后,验证项目没有引发编译器错误:
shutil.rmtree(f"{FOLDER}/models/project/build", ignore_errors=True)
arduino_project.build()
print("Compilation succeeded!")
输出结果:
Compilation succeeded!
上传到设备
最后一步是将 sketch 上传到 Arduino 以确保代码正常工作。Google Colab 不能做到这一点,所以必须下载 sketch。只需将项目转换为 .zip 文件,然后调用 files.download。若你在 Google Colab 上运行,则需取消最后两行注释才能在编写文件后下载文件。
ZIP_FOLDER = f"{FOLDER}/models/project"
shutil.make_archive(ZIP_FOLDER, "zip", ZIP_FOLDER)
# from google.colab import files
# files.download(f"{FOLDER}/models/project.zip")
在 Arduino IDE 中打开 sketch,必须为你所使用的板下载 IDE 和 SDK。对于某些板卡,例如 Sony SPRESENSE,可能需要更改设置以控制板卡使用多少内存。
预期结果
若一切正常,应该在串行监视器上看到以下输出:
Car results:
255, 0
Other object results:
0, 255
第一个数字代表模型判断物体是汽车的置信度,范围为 0-255。第二个数字代表模型判断物体不是汽车的置信度,范围也是 0-255。以上结果表示模型非常确定第一张图像是汽车,而第二张图像不是汽车。这个判断是正确的,表明模型正常运行了。
总结
本教程使用迁移学习来快速训练图像识别模型,并用来识别汽车。修改模型的输入尺寸和神经网络的最后几层,使模型效果更好,同时更快更小。然后量化模型并使用 TVM 进行编译创建 Arduino sketch。最后,使用两个静态图像对模型进行测试,证明它可以按预期工作。
下一步
修改模型从摄像头读取实时图像,在 GitHub 上有另一个 Arduino 教程说明如何操作。也可以 使用 TVM 的自动调整功能 来显著提高模型的性能。
脚本总运行时长:( 4 分 44.392 秒)